
Debug and Trace AMD Zynq™ UltraScale+™ MPSoC
Heterogeneous Multiprocessing Platform for Broad Range of Embedded Applications.
Implements:
- 4 x Application Cores Arm® Cortex®-A53
- 2 x Real-Time Cores Arm® Cortex®-R5F.
- 1 x Platform Management Unit MicroBlaze Hard-IP.
- Optional Arm® Cortex®-M3, Cortex®-M1 and MicroBlaze Soft-Cores in the FPGA Logic.
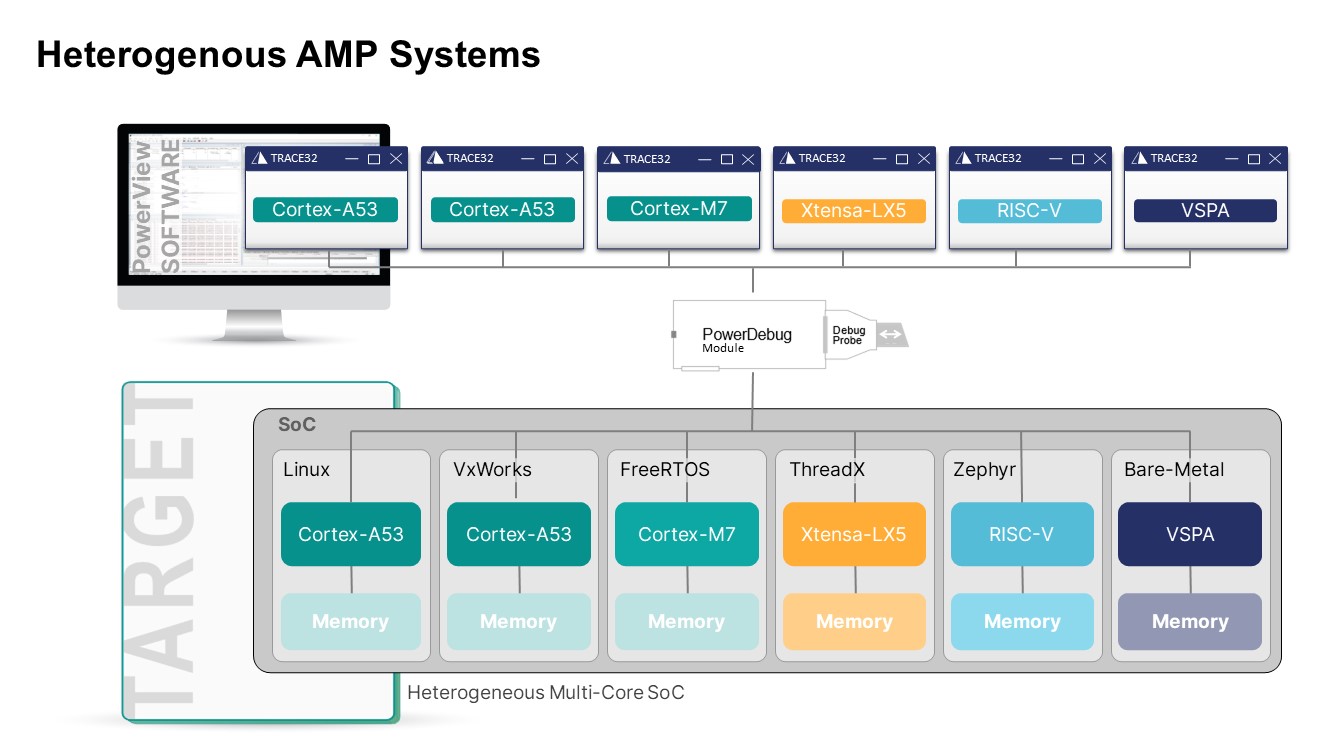
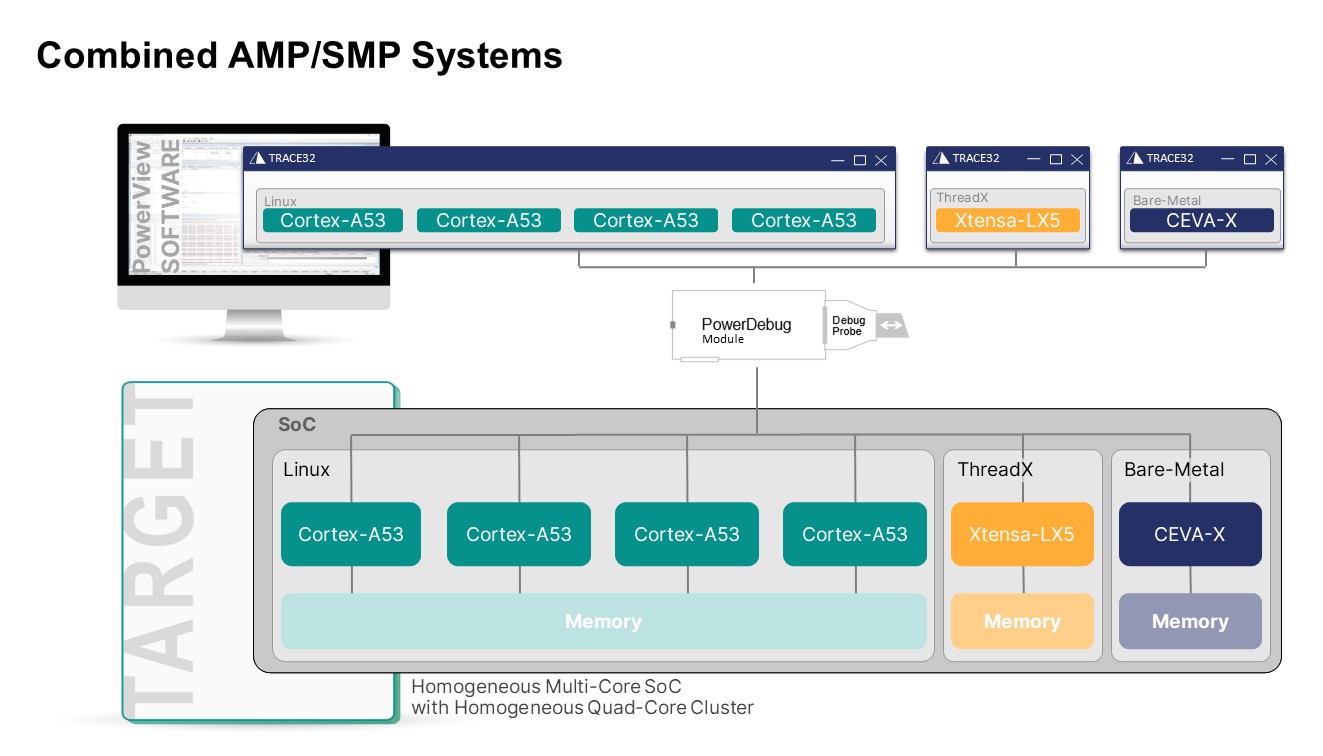
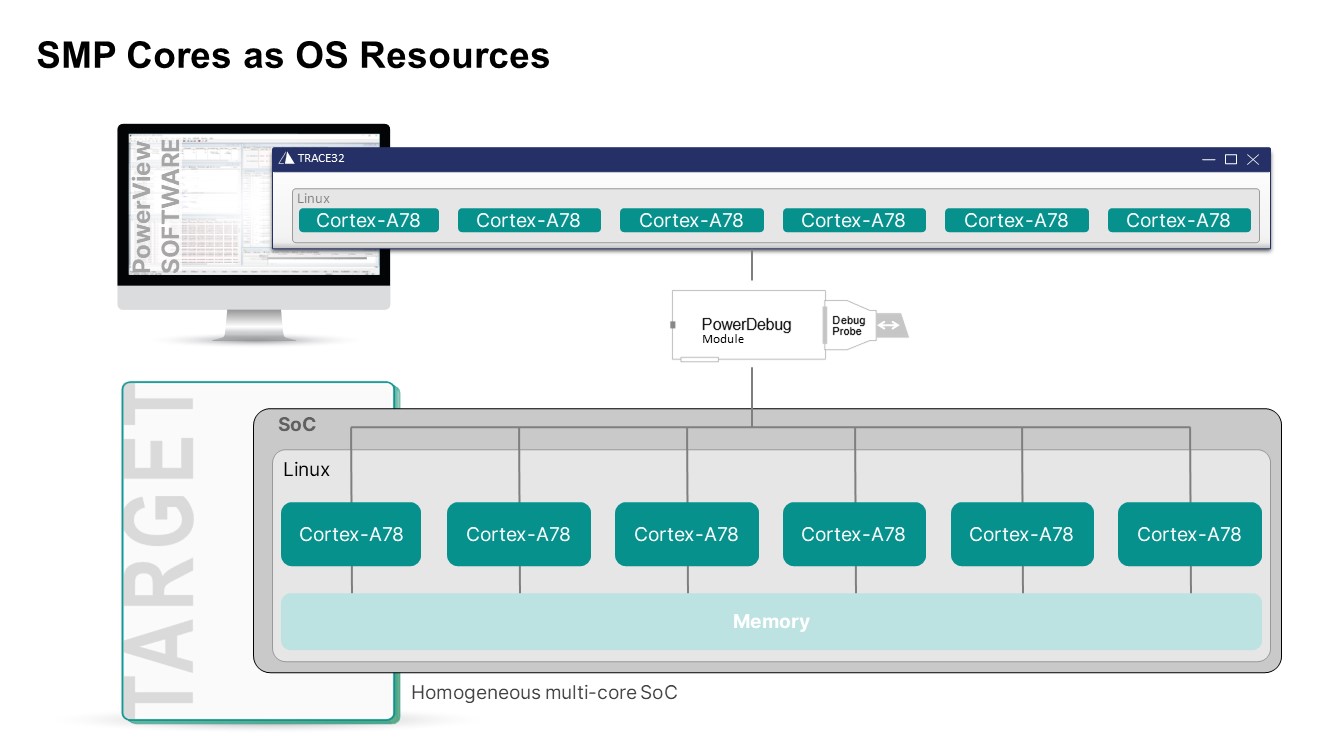
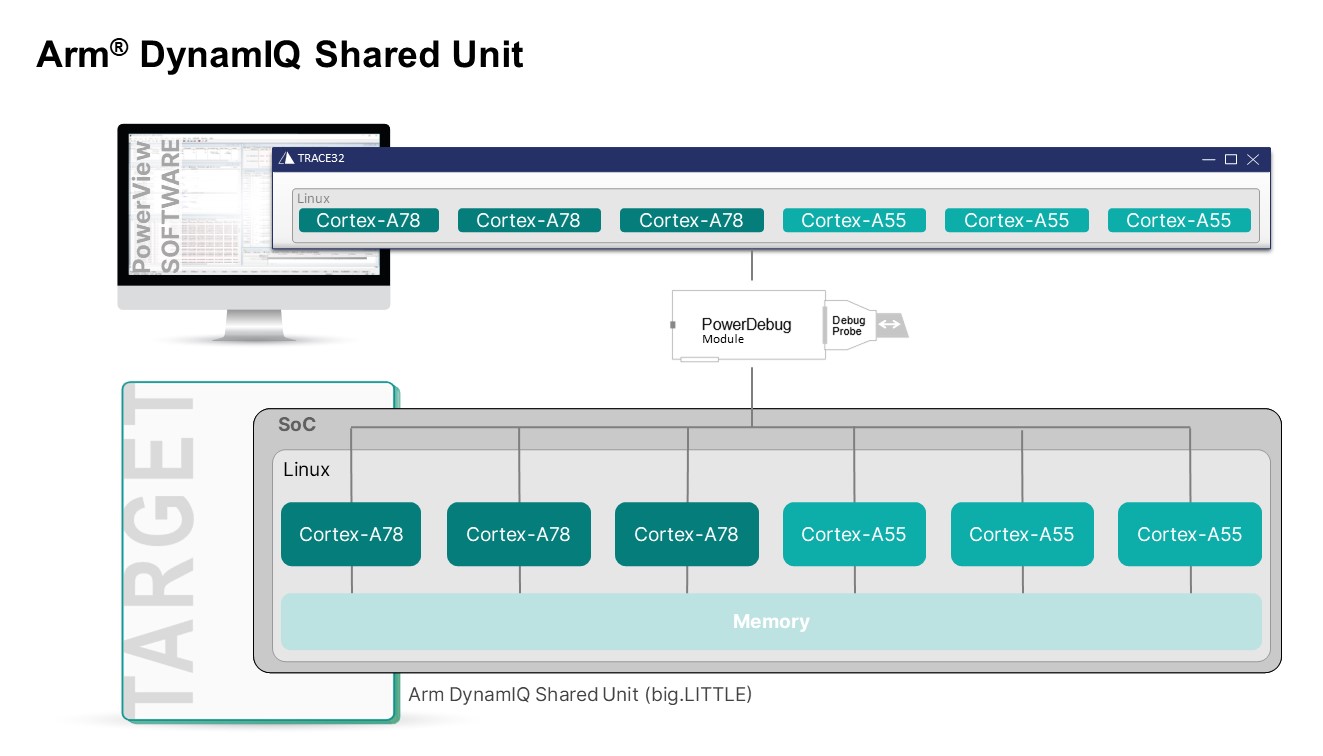
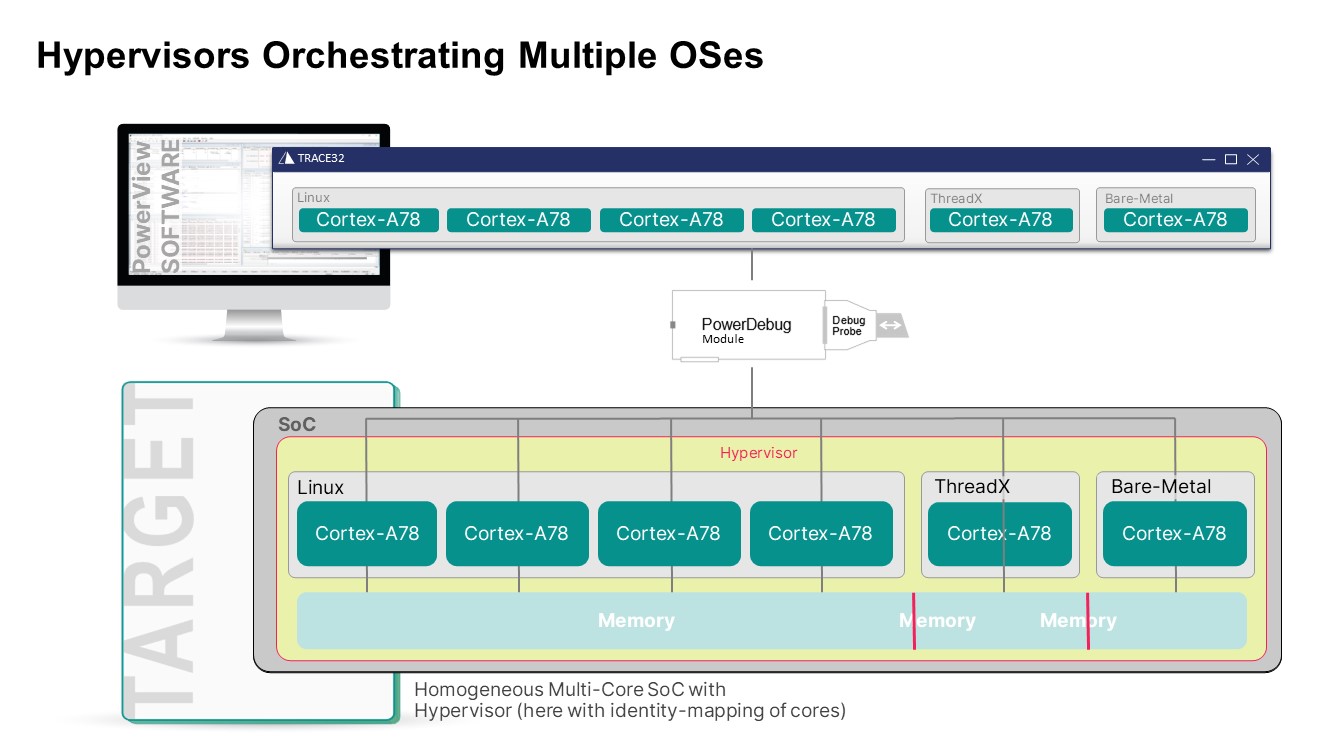
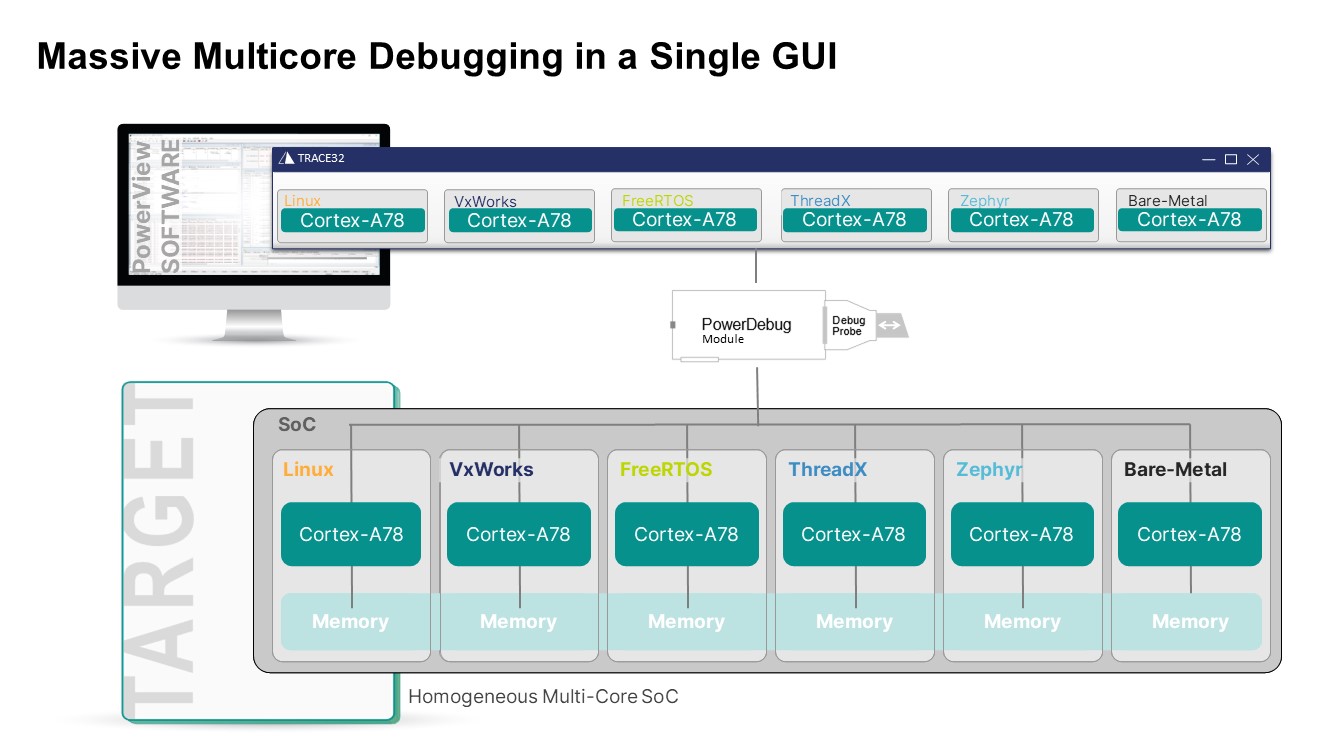
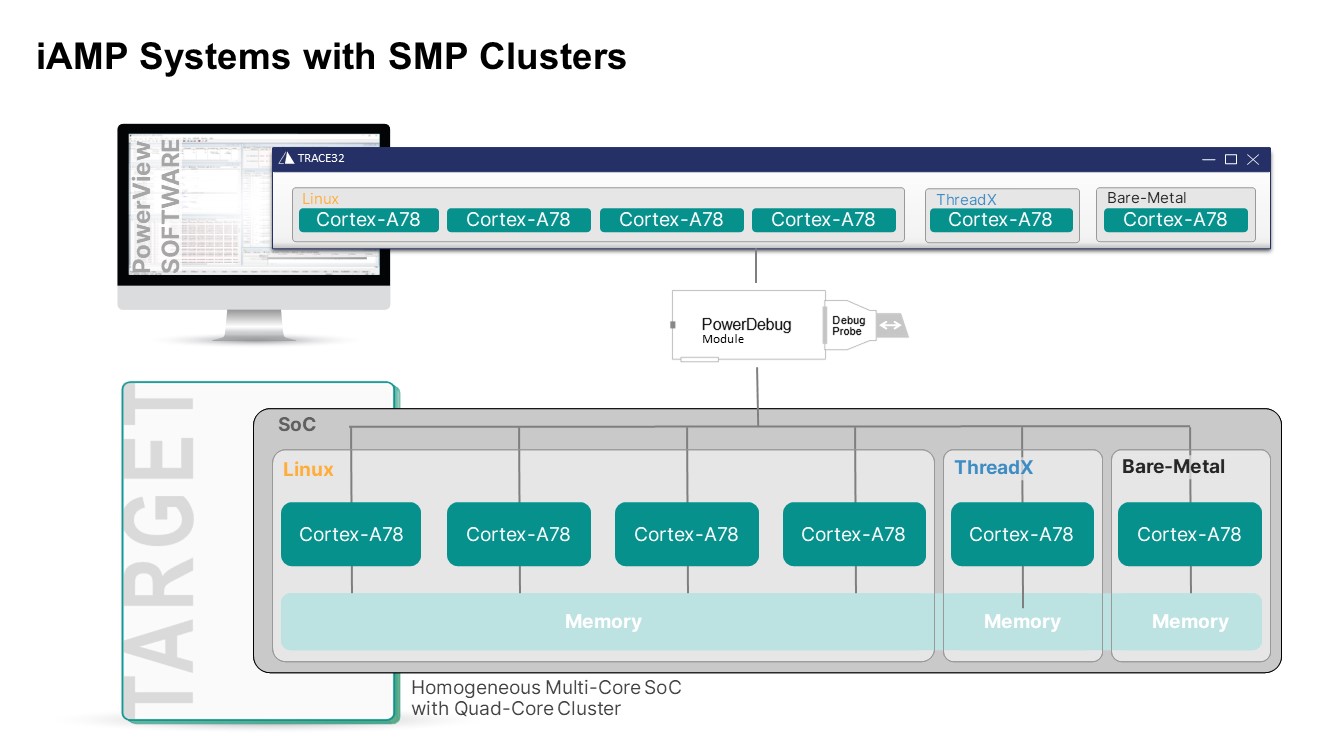
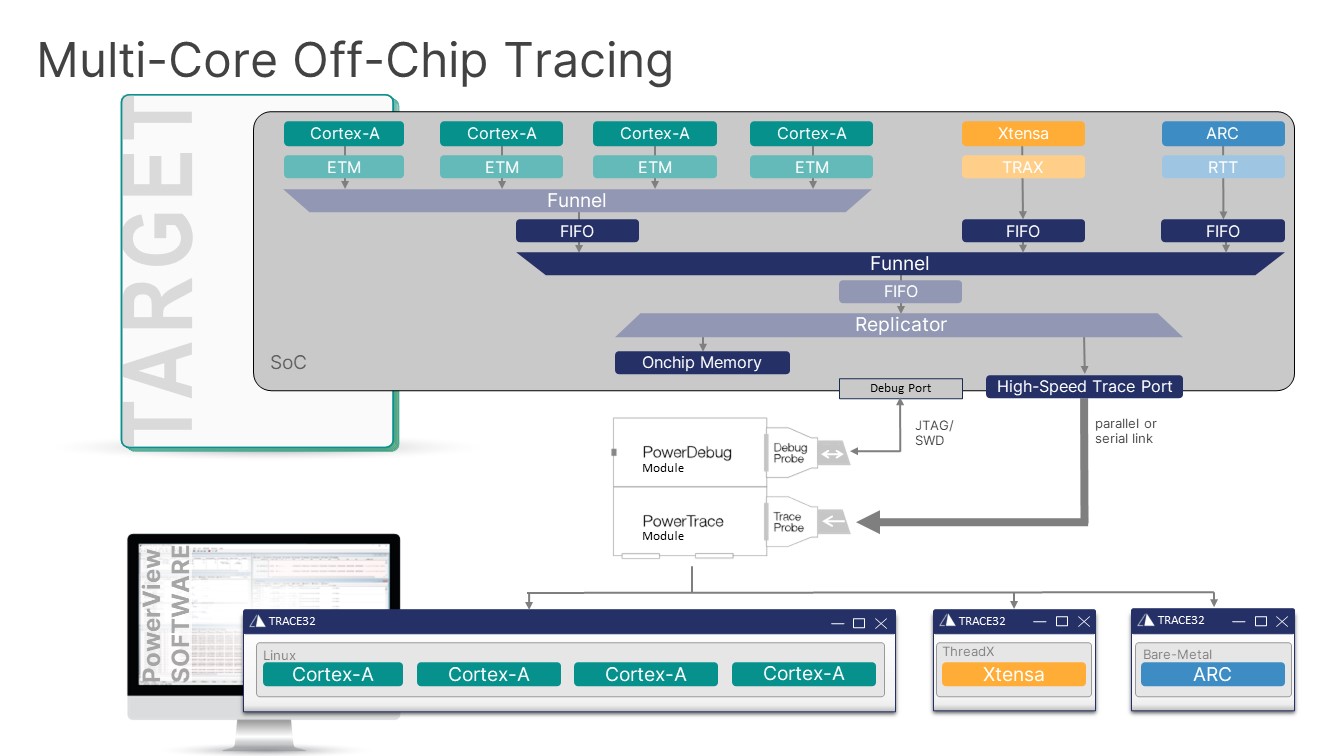
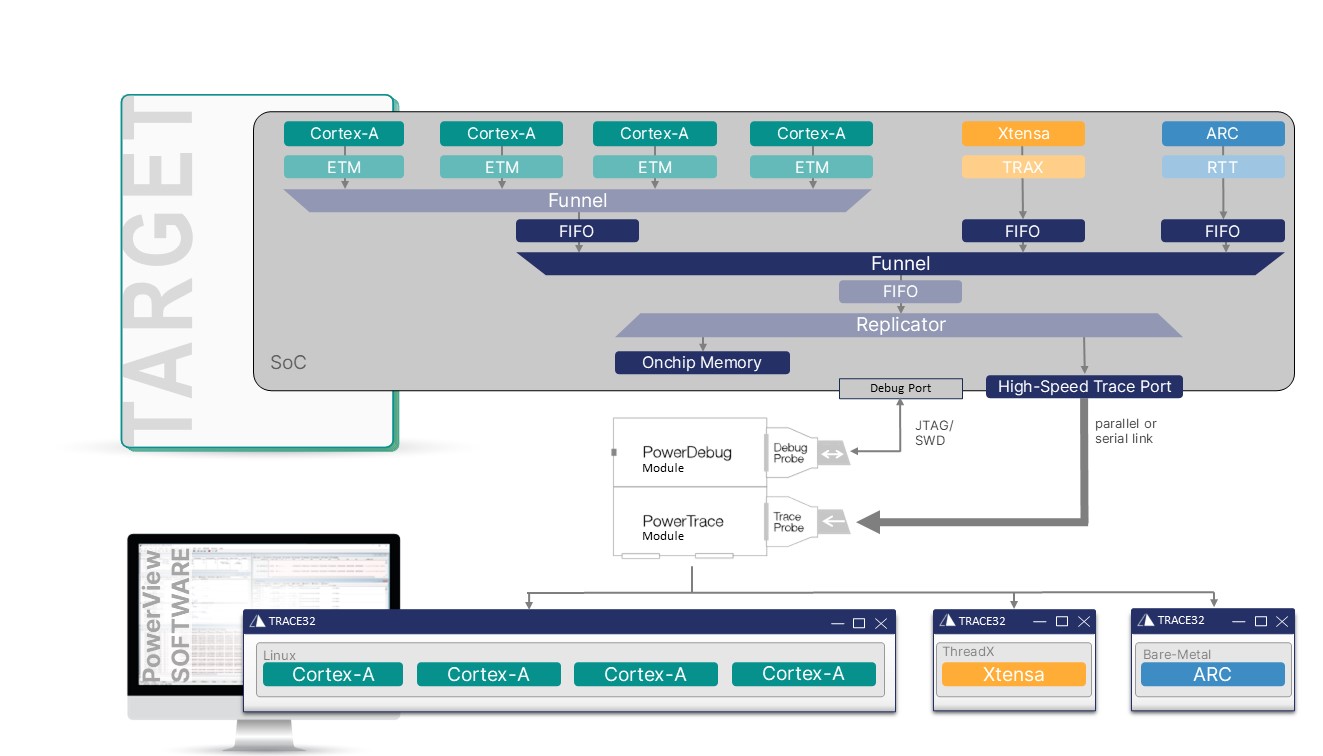
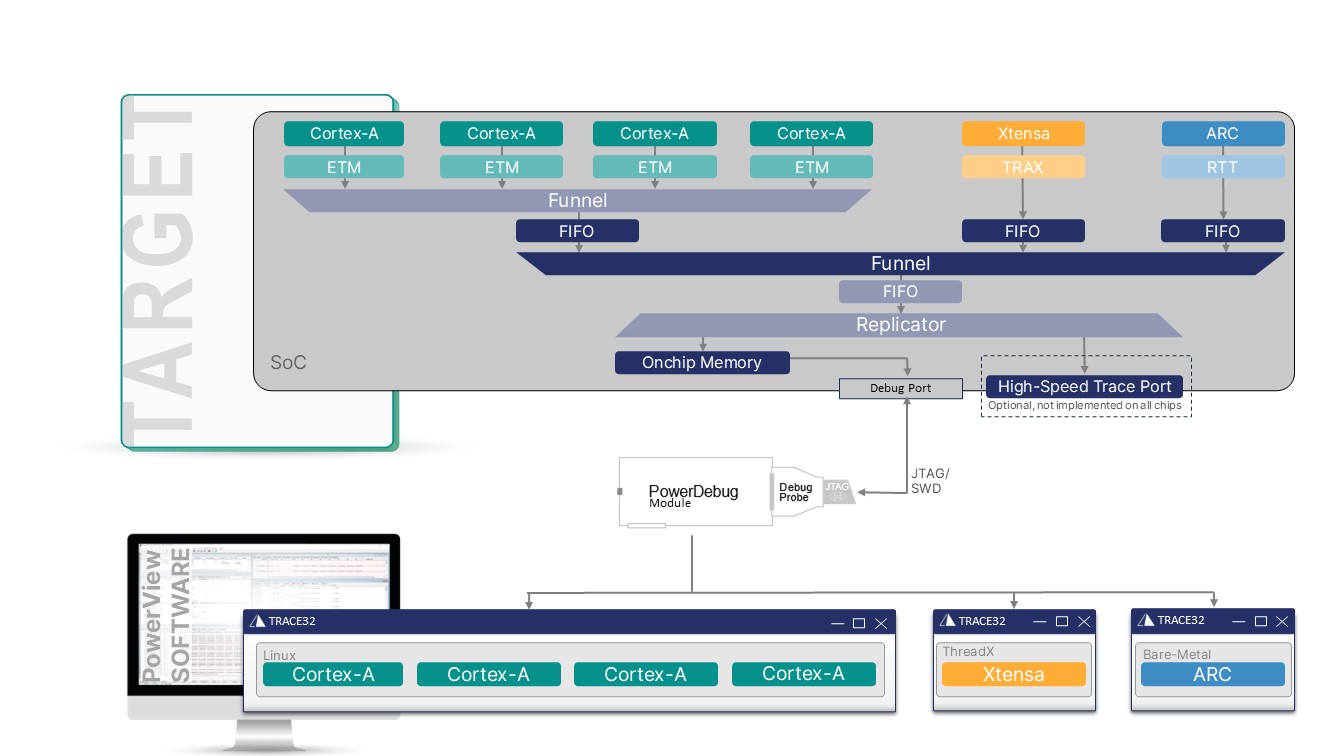
The application cores are typically configured as an SMP cluster running a rich OS like Linux, while the other cores usually operate asynchronously.
Our TRACE32® tools can debug all cores concurrently. You can trace the Cortex-A and Cortex-R cores via parallel or serial Off-Chip-Trace or via On-Chip-Buffers.





